 |
|
|
|
|
| Freiflugmodelle und Längsstabilität |
|
1. Tragendes oder nicht tragendes Höhenleitwerk?
Freiflugmodelle fliegen – die Startphase ausgenommen – mit einer bestimmten Geschwindigkeit, die durch die Trimmung des Modells festgelegt wurde. Da ihre Flugaufgabe darin besteht, von der jeweiligen Ausgangshöhe aus eine möglichst lange Gleitflugzeit zu erreichen, werden sie auf geringste Sinkgeschwindigkeit eingestellt. Wie das mit einer dynamischen Startphase zu vereinen ist, soll hier weniger interessieren.
Erstaunlich ist, dass diese lange Gleitflugzeit - anders als im gesamten übrigen Flugzeugbau, ferngelenkte Modelle eingeschlossen – bei Freiflugmodellen mit einem tragenden Höhenleitwerk erzielt werden soll, das zur Erfüllung seiner Aufgabe eine gewölbte Mittellinie hat.
Anfang der 50er Jahre schien die Frage des Höhenleitwerksprofils noch nicht entschieden. Deutsche Flugmodelle der Vorkriegszeit flogen mit symmetrischen Profilen im Höhenleitwerk und bedeutende, theoretisch bewanderte Modellflieger wie Max Hacklinger blieben eine Zeitlang dabei. F.W. Schmitz empfahl ein nicht-tragendes Höhenleitwerk 1955 in seinem grundlegenden Buch „Aerodynamik des Flugmodells“.
FW Schmitz, Aerodynamik S. 205/6 (pdf)
Anders erfolgreiche Praktiker wie Rudi Lindner und Karl-Heinz Denzin. Ihre Modelle wurden hundert- oder tausendfach nachgebaut, und sie hielten es für sinnvoll, das Höhenleitwerk zu wölben - teilweise stärker als das Flügelprofil. - Ohne weitere theoretische Debatte setzten sich dann in den 60er und 70er Jahren Höhenleitwerksprofile mit gerader Unterseite durch, die bei 7 bis 8% Dicke etwa 2,5% gewölbt waren.
Ich selber habe vieles ausprobiert und Anfang der 80er Jahre die damals aktuelle Profilfamilie variiert. Die Wölbung wurde nach vorne verlagert und die mehr oder weniger spitze Nase dick und rund gestaltet. Ziel war eine möglichst große Toleranz bei geringen Veränderungen des Anströmwinkels und damit sanftes Aussteuern bei kleinen Störungen, aber kräftiges Ansteigen des Auftriebs bei Turbulenzen, die das Modell „pumpen“ lassen (Girlandenflug). Das Modell sollte sich danach schnell beruhigen. Das Profil „Woebbeking 8%“ setzte sich allgemein durch. Mehr dazu in meinem Beitrag „Thermiksense“ 1/2005
Cheesman oder Wöbbeking (pdf)
Bleibt unklar, wie es überhaupt zu tragenden Höhenleitwerken im Freiflug kam. Thesen:
|
|
|
|
|
• |
Da bei vielen Freiflugklassen die Gesamtfläche einschließlich Höhenleitwerk limitiert ist, wollte man dieses zur Auftriebserzeugung hinzuziehen. (Das erklärt nicht, warum Höhenleitwerke auch dann tragend gebaut werden, wenn die Gesamtfläche frei ist – bei F1E oder offenen Segel- und Motorklassen).
|
|
• |
Stabilisierung nach Störungen im Gleitflug ist kein symmetrisches Geschehen. Der Höhenverlust nach Pumpen (überzogenes Flugzustand) ist deutlich größer als beim Tauchen des Modells. Und gegen das Pumpen hilft ein steiler Auftriebsanstieg im Höhenleitwerk, wie ihn gewölbte Profile liefern.
|
|
• |
Allen Freiflugmodellen gemeinsam ist die Thermikbremse durch das Hochklappen des Höhenleitwerks. Dieser „deep stall“ gerät nur dann zu sicherem Sackflug und nicht zum unberechenbaren Kunstflug, wenn das Höhenleitwerk belastet ist. Dazu muss der Schwerpunkt weit genug hinten liegen; das Leitwerk kann dann den „deep stall“-Zustand kontrollieren. Schwerpunkt-Rücklage verringert aber wieder die Einstellwinkeldifferenz, ohne die es nun mal keinen eigenstabilen Gleitflug gibt. Also verlangt die gesamte Konfiguration nach einem gewölbten Profil, das auch bei negativen Anblaswinkeln noch Auftrieb liefert. |
|
Die Position von Hacklinger und Schmitz darf nicht verwundern. Flugzeuge fliegen normalerweise mit einem Höhenleitwerk, das im eigenstabilen Flug Abtrieb liefert statt Auftrieb. Dabei kann das Leitwerk klein sein; der Schwerpunkt wandert absolut und im Verhältnis zum Neutralpunkt des Flügels nach vorne. Das Leitwerk wird so weit entlastet, dass es Abtrieb liefern muss, und so das Flugzeug eigenstabil macht. RC-Modelle werden entspechend konstruiert, weil sie sich agiler steuern lassen. Sie sollen nicht „schwimmen“, wie es Freiflugmodelle tun.
Neugierige Freiflieger gingen noch einen Schritt weiter und bauten den Abtrieb gleich ins Höhenleitwerk ein. Häufig sind ja auch die Leitwerksteile gepfeilter Nurflügel entsprechend ausgebildet. Jean-Francis Frugoli gewann die französische Meisterschaft 1984 in der populären Klasse F1G „Coupe d’Hiver“ mit einem auf den Rücken gelegten, herkömmlichen Höhenleitwerk. Und René Butty überraschte 1978 mit seinem gänzlich anderen F1A-Segler „Greenhorn“. Schwerpunkte der Modelle: 32% (F1G) und 25%(F1A).
F1A von René Butty "Aeromodeller" April 1979 (pdf)
Buttys F1A kann man in der Reihe einer erfolgreichen DDR-Tradition sehen. Uwe Rusch flog international sehr erfolgreich mit einem Höhenleitwerk, das als ebene Platte ausgebildet war. Ein Nachteil wurde offenbar, als man in den 70ern begann, durch Schleuderstarts die Ausgangshöhe des Gleitflugs von Segelmodellen zu verbessern. Während gewölbte Profile im Höhenleitwerk bei Beschleunigung die Nase des Modells tendenziell nach unten drücken und so ein vorzeitiges Aufbäumen samt Geschwindigkeitsverlust vermeiden helfen, müssen symmetrische Profile gesteuert werden.
In angelsächsischen Ländern wurden (und werden) im Freiflug „fixed surface“ – Motormodelle geflogen, also Modelle ohne Winkelsteuerung im Leitwerk. Das Höhenleitwerk liegt dann im Slipstream des Propellers und arbeitet gegen die Looping-Tendenz während des Motorlaufs. Liegt das Leitwerk nicht im Slipstream, wie bei sog. High-Thrust-Motor-Anordnungen, muss man seinen Auftrieb durch stärkere Wölbung erhöhen, um den gleichen Effekt zu erzielen. Siehe dazu den Erfahrungsbericht in "Thermiksense" 2/2000:
Die aerodynamische Balance (pdf)
Das Flügelprofil Wortmann M2, das aussieht wie ein auf 5 % gewölbtes Woebbeking 8%, hatte ich schon 1983 im Höhenleitwerk eines F1A Segler ausprobiert. Dabei musste bei unveränderter Schwerpunktlage die Einstellwinkeldifferenz um ca. 1,5 ° vergrößert werden. Meiner Erfahrung nach sind damit ausgestattete Modelle generell – gleich ob Segel- oder Motormodell – besonders einfach zu trimmen und zuverlässig zu fliegen. Siehe dazu den Beitrag für das britische Free Flight Forum 2004:
The Freeflight Auto-Pilot (pdf)
Haben solche Erfahrungen mit ungesteuerten Modellen irgendwelchen Nutzen auch für andere Flächenmodelle? Diese werden ja zu 99,9% ferngelenkt.
Ich meine ja. Immer wenn es um möglichst geringe Sinkgeschwindigkeit geht, kann ein tragendes Höhenleitwerk die Flugeigenschaften positiv beeinflussen. Auch bei den so populären Elektro-Segelmodellen: Die Motorachse muss bei diesen nach unten geneigt sein (Sturz), damit das Modell im Steigflug nicht überzieht. Im Allgemeinen wird zusätzlich das Höhenleitwerk gedrückt. Stimmt die sonstige Konfiguration, kann man sich mit tragendem Höhenleitwerk beides sparen! Das Modell steigt sauber, gleich wie hoch die Antriebsleistung.
2.Schwerpunktbestimmung
Während Schmitz noch von „Druckpunkt“ des Flügels spricht, hat sich nach dem 2. Weltkrieg dank der Forschung der US-amerikanischen NACA (heute NASA) die Neutralpunkttheorie durchgesetzt. Siehe dazu den Text für die Lehrer-Zeitschrift MINT.
Warum ist Fliegen sicher? (pdf)
Für den Freiflug hat Klaus Peter Beuermann diese Neutralpunkttheorie zu adaptieren versucht, und zwar gerade für das Fliegen mit tragenden Höhenleitwerken. Das war 1958.
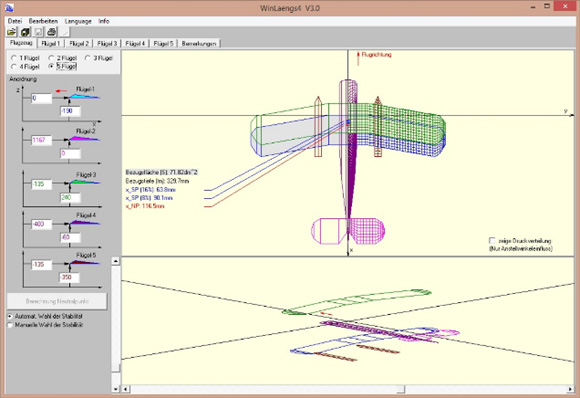
Heute erlauben beispielsweise Programme von Jörg Rußow und Dietrich Meissner (http://home.germany.net/100-173822/schwerp.htm), die Daten des eigenen Modells einzutragen; die Programme errechnen sogar für Doppel- oder Dreidecker, Entenmodelle oder Nurflügel den korrekten Schwerpunkt.
|
|
Doch: Der von ihnen vorgeschlagene Schwerpunkt liegt bei tragenden Höhenleitwerken viel zu weit vorne! Ich habe das 2007 für eine Artikelserie in FMT an einem Modell ausprobiert, bei dem sich der Flügel problemlos auf dem Rumpf verschieben ließ. Nach dem Vorschlag des Rußow/Meissner-Programms war das kleine Gummimotormodell („P30“ – 762 mm Spannweite und 762 mm Länge) nicht flugfähig. Ich musste den Flügel beim Einfliegen so weit nach vorne verschieben (also den Hebelarm des Antriebs vorne verringern), bis der Schwerpunkt von 40% auf 68% der Flügeltiefe zurück verlegt war.
Jetzt galt es, das Beuermann-Programm von 1958 zu prüfen. Es bestand diese Prüfung mit Bravour, denn es schlug Neutralpunkt und Schwerpunktlage des Modells genau so vor, wie es das praktische Einfliegen ergeben hatte.
Beuermann Flugmodellbau 2-1958.pdf
Beide Programme, das von 1958 wie das von 2015, berechnen nicht den Schwerpunkt, sondern den Neutralpunkt des gesamten Modells. Dem Erbauer bleibt es überlassen, das Stabilitätsmaß zu bestimmen, das über den Grad der Eigenstabilität entscheidet. Dabei gilt im Prinzip „Viel hilft viel“: Je weiter der Schwerpunkt vorm Neutralpunkt, desto höher die Eigenstabilität.
Mit der effektiven Flugleistung hat das wenig zu tun. So kann die Strömung auf der Unterseite des Höhenleitwerks abreißen, weil wegen des zu weit vorliegenden Schwerpunkts die EWD zu groß ist. Im Ergebnis fliegt das Modell schlecht oder gar nicht. - Der Abstand des Schwerpunkts vom Neutralpunkt und damit das Stabilitätsmaß wird in Prozent der mittleren aerodynamischen Flügeltiefe ausgedrückt. Beuermann empfiehlt 15% Abstand, was den kritischen, spitznasigen Höhenleitwerksprofilen der 50er Jahre geschuldet ist. Bei geringem Stabilitätsmaß neigten diese zum Unterschneiden. Bei den rundnasigen Profilen von heute genügen dagegen 9% Abstand für einen sicheren Flug. Das kleine Stabilitätsmaß lässt die Modelle nicht nur besser gleiten und mit geringeren Höhenverlusten durch Turbulenzen segeln, es erlaubt auch einen dynamischen Start, ohne dass dieser gleich mit dem Höhenleitwerk ausgesteuert werden muss. |
|
|
|
|
